ONTWERPOPDRACHT.
TECHNISCHE SYSTEMEN.
TU DELFT.
GIGA
GRIJPERTJE
56.
PROJECTGROEP
produced by:







TOPS

HERHALING
Door de grote bewegingsvrijheid van de grijperhand kan de grijper een object loslaten en terug naar
zijn beginpositie om daar een nieuw object op te pakken.
Het toepassen van afstelbare elastieken maakt het optillen van een breed scala aan vormen en
gewichten mogelijk
VIERSTANGEN
Door het toepassen van een parallellogram-mechanisme blijft het object gedurende het optillen
recht overeind.
STABILITEIT
Omdat het kinematische model van de rails maar één beweging toelaat, wordt het object stabiel horizontaal verplaatst.
proces
OPDRACHTBESCHRIJVING
De kern van de opdracht is een volledig mechanische grijper bouwen die ronde bekers, flesjes en tetrapakken kan optillen en op een hoger en naast gelegen plateau neer kan zetten. Uiteraard zijn er meer eisen waar de grijper aan moet voldoen. Hier volgen de belangrijksten:
De grijper moet worden aangedreven door pneumatische cilinder-actuatoren
De minimale inhoud van het bekertje, flesje en tetrapak is 0,5 liter en moet met en zonder inhoud verplaatst worden
Het frame waar de grijper aan gebouwd wordt, is voor de helft beschikbaar (250mm)
De verticale beweging moet minimaal 150 mm zijn en de horizontale beweging minimaal 100mm
Het voorwerp wat gegrepen wordt moet op het hoger en naast gelegen plateau kunnen worden neergezet zonder om te vallen
De grijper moet na het neerzetten terug naar de beginstand kunnen
OP ONDERZOEK UIT
Grijpers, ze komen voor in alle soorten en maten, voor elke denkbare toepassing. Door eerst kritisch naar bestaande ideeën voor grijpers te kijken, wordt er inspiratie opgedaan om een creatief eigen ontwerp van en grijper te bedenken.
VAN COMBINEREN KAN JE LEREN
Om vanuit verschillende individuele ontwerpen tot een definitieve keuze voor een grijper te komen, is er gebruik gemaakt van een weegtabel. Hierin zijn overzichtelijk alle voor- en nadelen van de individuele ideeën weergegeven.
HET ZIT HEM IN DE DETAILS
De gekozen grijper kan worden opgedeeld in verschillende onderdelen. Om een optimaal resultaat te bereiken zijn alle de onderdelen nauwkeurig uitgedacht met behulp van berekeningen, waarna ze in solid works zijn gezet.
MOMENT VAN DE WAARHEID
Nadat de grijper, de armen en de rails gebouwd waren, zijn deze samengevoegd tot mechanische grijper. Uiteraard was het erg spannend om te testen of de mechanische grijper ook daadwerkelijk zo goed zou werken als op papier uitgedacht was.
BEELDEN SPREKEN VOOR ZICH
Tekst, schetsen en berekeningen zeggen veel, maar beeld zegt meer! Aanschouw het resultaat...
TIPS EN TOPS: EVALUATIE
Wat als er meer tijd was geweest om de perfecte mechanische grijper te realiseren? En waar kan na afloop trots op teruggekeken worden? Kom achter de tips en tops!
WEEG
tabel








ARMEN
GRIJPER
RAILS
FLEXIBILITEIT
De grijper trekt in één beweging het object naar zich toe, en klemt het vast tegen de arm. Door deze simpele beweging kan de grijper het object op het plateau loslaten, en dan zonder het object om te stoten terug naar zijn beginpositie.
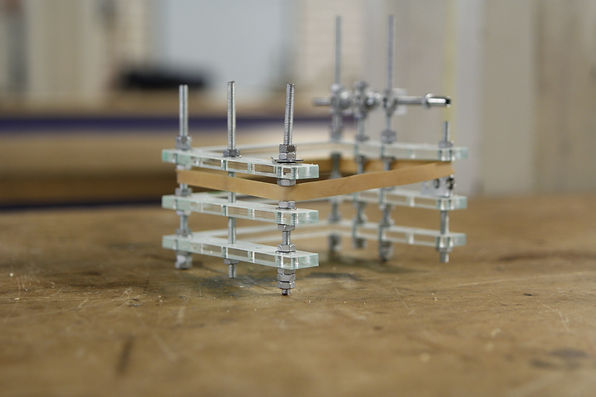
De hand bestaat uit drie u-vormige platen, aan elkaar verbonden met draadeind en moertjes. De pneumatische cilinder zorgt voor de benodigde kracht voor het openen en sluiten. Deze zit vast in de plaat, en op drie verschillende punten op de hand, voor maximale stevigheid. Bij het sluiten van de hand vallen de uiteinden van de u-vormen in sleuven in de plaat voor extra ondersteuning tijdens het optillen. Elastieken zorgen voor wrijving tussen het object en de hand en de juiste vorm om verschillende objecten met dezelfde grijper op te tillen.
De arm tilt de grijperhand samen met het object op. De benodigde kracht voor het optillen wordt voorzien door de pneumatische cilinder.
De arm is zowel bevestigd bij de grijper als bij de rails. Bij het ontwerpen van de arm is het vierstangenmechanisme toegepast. Het vierstangenmechanisme zorgt ervoor dat de constructie
omhoog kan bewegen. Met behulp van de wet van Grashof kan zo de lengte van de stangen aangepast worden zodat de arm een parallellogramconstructie krijgt.
Hierdoor blijft het object gedurende het optillen recht overeind staan.
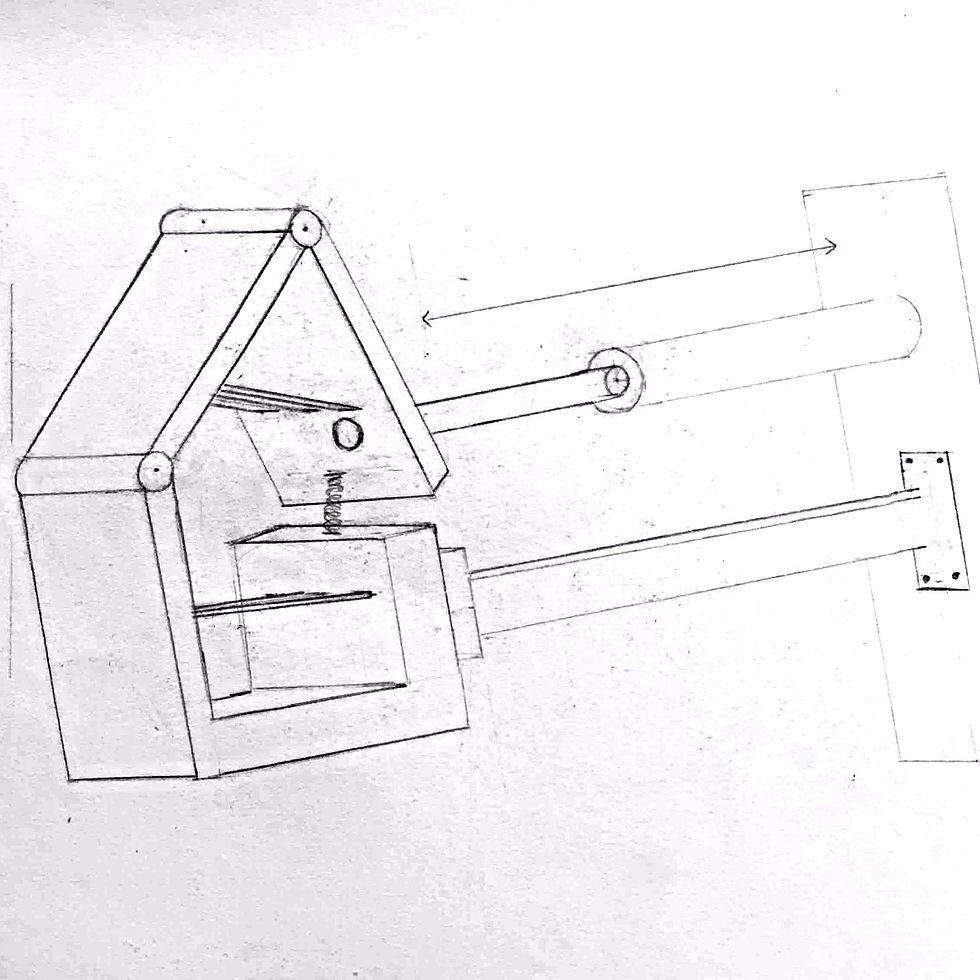
De rails is deels bevestigd op het bord en deels op een zelf geconstrueerde uitbreiding van het bord. Aan de rails zijn twee buizen parallel opgehangen. Op deze twee buizen passen weer aansluitende buizen, waarop de plank bevestigd wordt die de hele grijper zal verplaatsen. De twee buizen zijn beiden van RVS gemaakt. Dit materiaal heeft een lage wrijving, waardoor het geheel goed kan glijden. Aangezien het geheel niet té snel moet glijden om het water in het verplaatste voorwerp te houden, is de rails een klein beetje schuin gezet. Door de hogere wrijving is er minder waterverlies.
Uit het kinematisch model blijkt dat er maar 1 graden van vrijheid is van de rails, waardoor de grijper zich alleen horizontaal kan verplaatsen. Dit is zeer voordelig voor de stabiliteit van de mechanische grijper.
berekeningen


RAILS
Criterium van Grubler:
F = 3(n-1) -2g1
F = aantal vrijheidsgraden
n = aantal stangen
g1 = aantal scharnieren
F = 3(2-1) - 2*1 = 1
Met bovenstaande formule is bewezen dat er maar 1 graden vrijheid is van de rails.

DRUK
De minimaal vereiste druk om de grijper met een flesje water van 0,5 liter op te tillen is 1,95 bar. Hierbij is de massa van de onderdelen zelf verwaarloosd, maar dit zal geen probleem vormen omdat de maximale druk die het bord levert 5 bar is. Het door de fabrikant opgegeven oppervlakte van de grote zuiger is gebruikt.
Bij een druk van 1,95 bar zal de grijperhand een kracht van 7,36 Newton uitoefenen op het op te tillen object. Of dit genoeg is zal blijken tijdens de test, anders kan de druk altijd worden verhoogd tot 5 bar.
solid works

Na het bouwen van de grijper, is deze flink getest. Veel dingen moesten nog veranderd of verbeterd worden, zoals in elk proces. De aangrijppunten van de actuatoren zijn op verschillende hoogtes bekeken.
Door goed overleg en door creatief te denken kwam men steeds dichter bij het gewenste resultaat. Andere dingen die afgesteld moesten worden waren: de elastiek spanning en de wrijving van de rails. De 2 grote aanpassingen van het oorspronkelijke idee zijn: een verlenging van de bovenste U-vorm en van de actuator van de grijparm. Bij het tillen van een tetra pak is de u-vorm te kort om in het bijbehorende gat te komen, daarom is deze arm verlengd. De verlenging van de actuator heeft als gevolg dat deze beter vastgemaakt kon worden. Hierdoor waren er 3 bevestigingspunten mogelijk. Nu kan de grijper slechts draaien om de as van de cilinder. Met slechts 1 bevestigingspunt, zoals onze eerste uitgangspositie was, zat hier veel meer beweging in. Deze aanpassingen zorgen ervoor dat we een betere, functionele grijper hebben.
KANTELEN
VAN
GRIJPHAND
Een van de complicaties bevond zich in het grijp gedeelte.
Op het moment dat de grijper het voorwerp
had neer gezegd en weer terug schoof, draaide het uitgeschoven grijper mechanisme door de zwaartekracht 90 graden.
Dit had voor het grijpen zelf geen nadelig effect maar het is niet netjes afgewerkt.
De makkelijkste oplossing is een extra aanhechting,
maar dan kan de grijper
het voorwerp niet
neerzetten en vervolgens
weg bewegen.
De oplossing is om een touw vast te maken aan de grijper dat boven de grijper vast zit.
BEWEGINGS-
VRIJHEID
De mogelijkheid van de grijperhand om terug naar de beginpositie is een van de behaalde doelen. De hand heeft namelijk een grote bewegingsvrijheid en kan zo het object loslaten en terug naar zijn begin positie om een nieuw object op te pakken.
TE WEINIG
WRIJVING
ELASTIEK
Een ander probleem was dat er soms te weinig wrijving werd opgewekt door de
elastieken, het voorwerp dat verplaatst moest worden gleed dan naar beneden. Als er nog
meer elastieken gebruikt worden om de weerstand te verhogen kon de actuator niet meer
hard genoeg terug trekken om het voorwerp vast te klemmen.
De oplossing hiervoor is om
elastiekjes te nemen die meer rek hebben.
Dan kunnen er meer elastiekjes op de grijper
gezet worden zonder dat de grijper niet meer werkt.
afstelbare
elastieken
Door het gebruik van afstelbare elastieken kan de grijper een breed scala aan vormen en gewichten optillen. Hierdoor is het doel om en een flesje, en een bekertje, en een tetrapak op te tillen bereikt.
HOOGTE VAN STARTPOSITIE
HARDE KLAP
NEERZETTEN
GRIJPER
Tijdens het neerzetten klapt de grijper hard tegen de grond. De arm is zo uitgemeten dat
hij vlak boven de grond zit in de beginpositie, omdat het bekertje recht in de grijper moet. Bij de snelle neerwaartse beweging geeft de arm echter door en verliest de grijper niet direct al zijn snelheid in de beginpositie. Hij verliest pas al zijn snelheid als hij de grond raakt. En dit
gaat gepaard met een harde klap die een slecht effect heeft op de grijper en overigens ook niet fraai is. De beginpositie verhogen is geen optie omdat het bekertje dan niet goed meer gegrepen kan worden. Wel is het een optie om de klap op te vangen aan de onderkant van de grijper. Bijvoorbeeld met stukken spons of met veren.
vierstangen &
paralellogram
De vierstangenmechanisme- en parallellogramconstructie-theorie wordt goed toegepast in de grijper. Door het toepassen van een parallellogram-mechanisme blijft het object gedurende het optillen recht overeind.
De actuator die de grijper bestuurd is bevestigd aan het plaatje wat ook gelijk zorgt voor stevigheid van de arm. Hierdoor steekt hij een stuk uit in de richting van de arm. De arm beweegt bij de tweede beweging (veroorzaakt door de grote actuator) omhoog, hierbij moet de actuator recht
blijven omdat de grijper ook recht moet blijven. Het plaatje blijft recht omdat de armen met het hout aan de rails en het plaatje een parallellogram vormt. De actuator is dus gewoon aan de actuator bevestigd. Er is echter een verbindingsstang tussen twee van de vier armen die ongeveer op de zelfde hoogte als de actuator begint, maar minder hoog uit komt na de opwaartse beweging.
De enige manier om de grijper te laten werken is er voor te zorgen dat de actuator boven de stang begint. Hiervoor moet de arm in de startpositie recht zijn. De constructie die aan de rails vast zit is (de houten plank met daaraan de arm en de grijper) te lang waardoor het geheel te hoog op het bord geplaatst moest worden. De beginstand van het bekertje moet dus ook omhoog.
Dit kan worden opgelost door een stuk (wat overigens niet gebruikt wordt) van het hout af te zagen en het hele geheel lager op het bord te bevestigen.
De actuator komt dan boven de stang uit als het bekertje op de grond begint. De afgelegde weg blijft uiteraard gelijk.
TIPS TIPS TIPS TIPS TIPS TIPS TIPS TIPS TIPS
TIPS TIPS TIPS TIPS TIPS TIPS TIPS TIPS TIPS
TIPS TIPS TIPS TIPS TIPS TIPS TIPS TIPS TIPS
ToPs ToPS ToPS ToPS ToPS ToPS ToPS ToPS
kinematisch model
De constructie van de rails zijn zo uitgekozen dat de helft van het bord uitgebreid wordt tot een groter bereik in de horizontale richting. Zo is het mogelijk dat de beweging zonder enige belemmering van het frame verloopt en ook meer speling is in de horizontale beweging. Bovendien zijn de rails zo geconstrueerd dat ze goed met de juiste wrijving geleiden. De horizontale beweging verliep hierdoor soepel.